







高精度车载导航方案
项目背景
当前智能化移动设备对高精度、高可靠定位已成刚需,传统移动设备定位主要依靠普通的GNSS定位技术,这种技术易受外界环境影响,导致定位偏差甚至丢失;GNSS/INS的组合方式可以有效改善上述问题,多源数据融合的方案更是成为无人驾驶可靠定位的首要选择。
解决方案
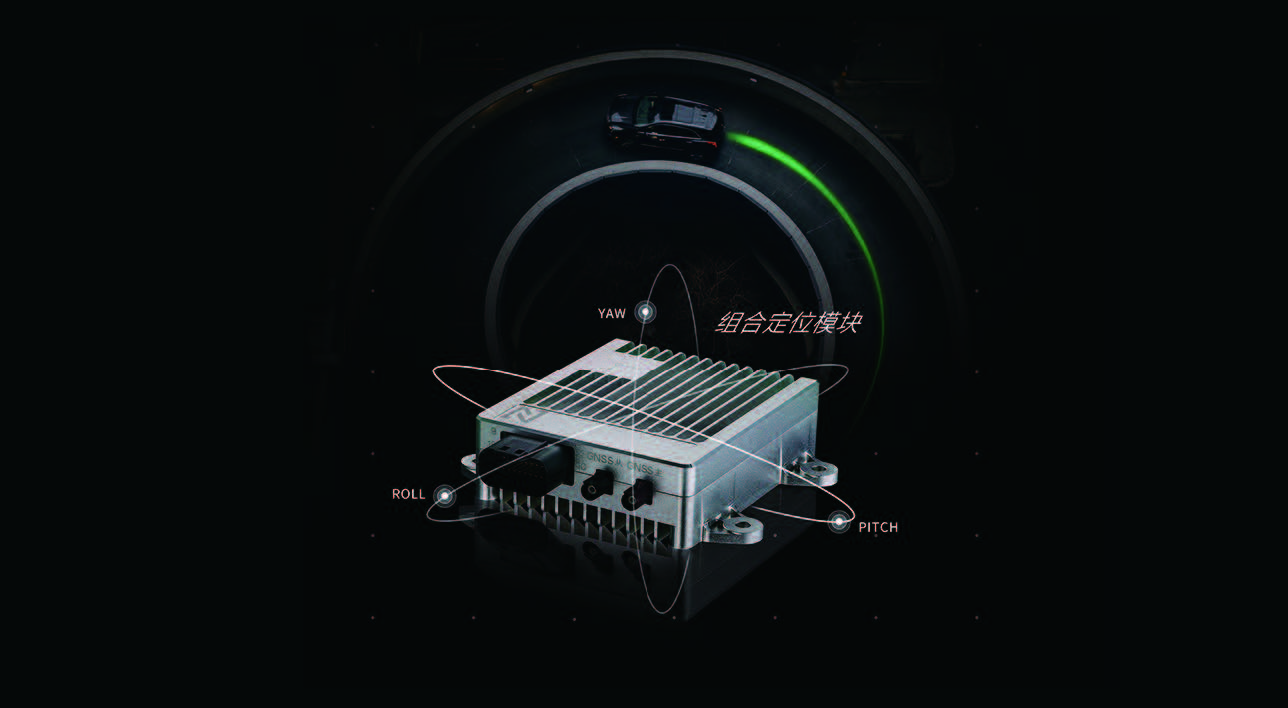
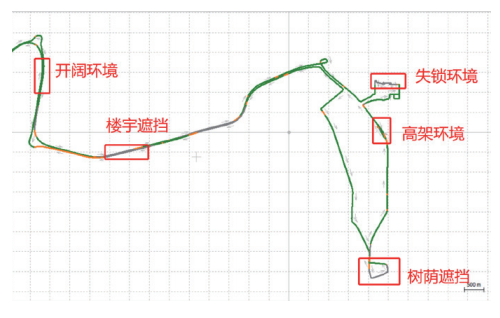
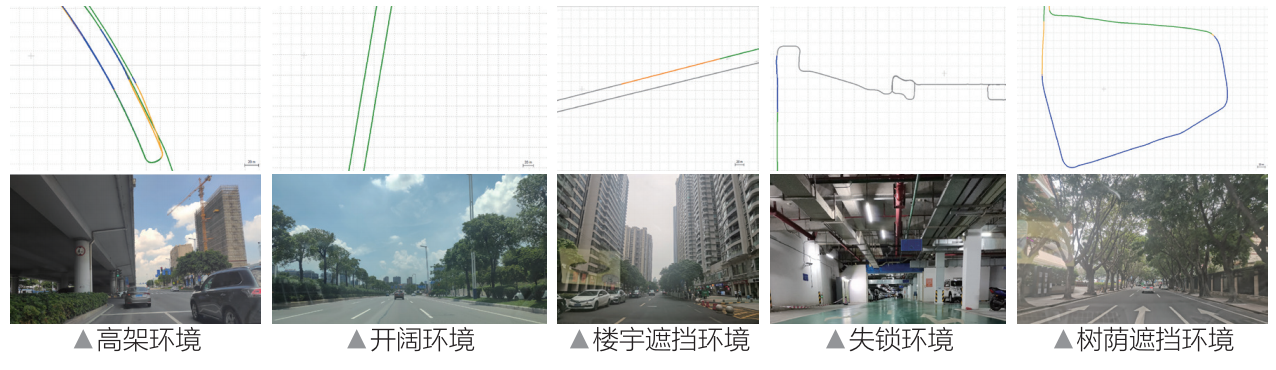
技术背景:GNSS/INS 紧耦合定位定向技术,车辆实现全场景精准定位。
技术应用:
1.高频率实时输出紧耦合位置、速度、姿态数据;
2.循环保存移动端卫惯原始数据(内置8G存储),支持定位后处理;
3.与其他传感器实现数据同步(PPS、GPRMC等);
4.数据回传服务器,支持后台监控。
安装调试流程
1.车端安装天线和组合导航模块,保持差分供给正常,供电正常;
2.量取主从天线杆臂参数并对模块相关参数进行配置;
3.一定环境下进行跑车标定,确保参数标定正常;
4.导航定位,输出定位结果并解析。
注:确保天线和模块正确安装且相对位置不变的条件下,模块只需标定一次。
项目成果
优势体现:
1.体积小、精度高、定位定向可靠;
2.支持BDS、GPS、GLONASS、GALILEO双频定位定向;
3.紧耦合/松耦合算法;
4.支持融合轮速档位信息、摄像头数据、高精地图数据;
5.车规级设计;
6.丰富的外部接口:以太网、USB、串口、can 口。
案例推荐阅读






 顶部
顶部